Après avoir refait la salle TV et habillé le mur avec une étagère steampunk, il faut maintenant traiter ce placard qu’on a découvert !










On marque une pause et on réfléchit.
Je prends photoshop et on se projette :





ou bien simulation d’un placard invisible, mais vraiment invisible !
Conclusion, pour mettre en valeur l’étagère, on reste sur quelque-chose d’invisible, mais on exploite l’espace libéré par le placard.
Je commence par refaire la tranche nickel avec du map et une bande armée, puis peinture mate identique au mur. L’avantage avec la peinture mate, c’est que les retouches sont invisibles !

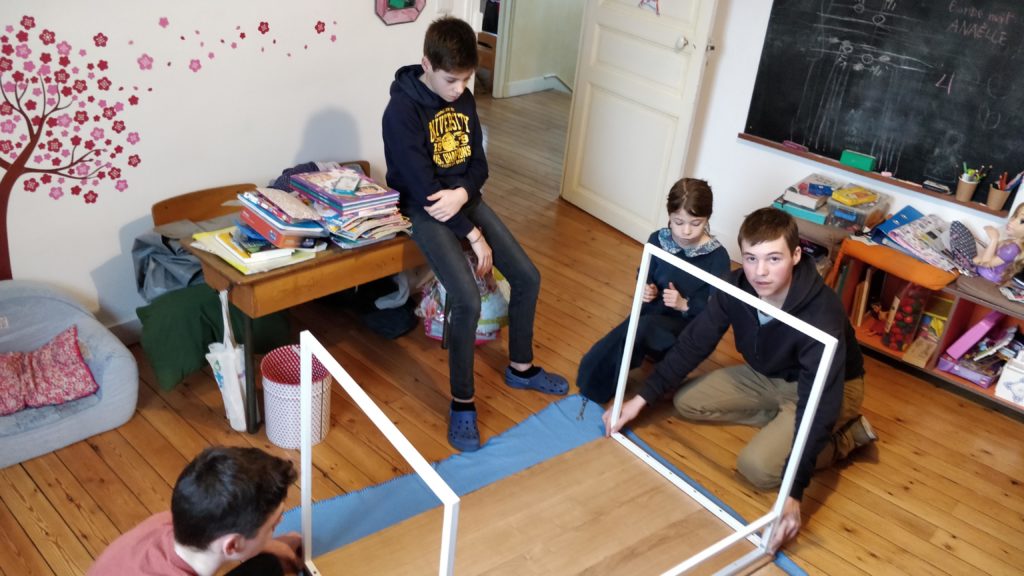
Fixation de la structure






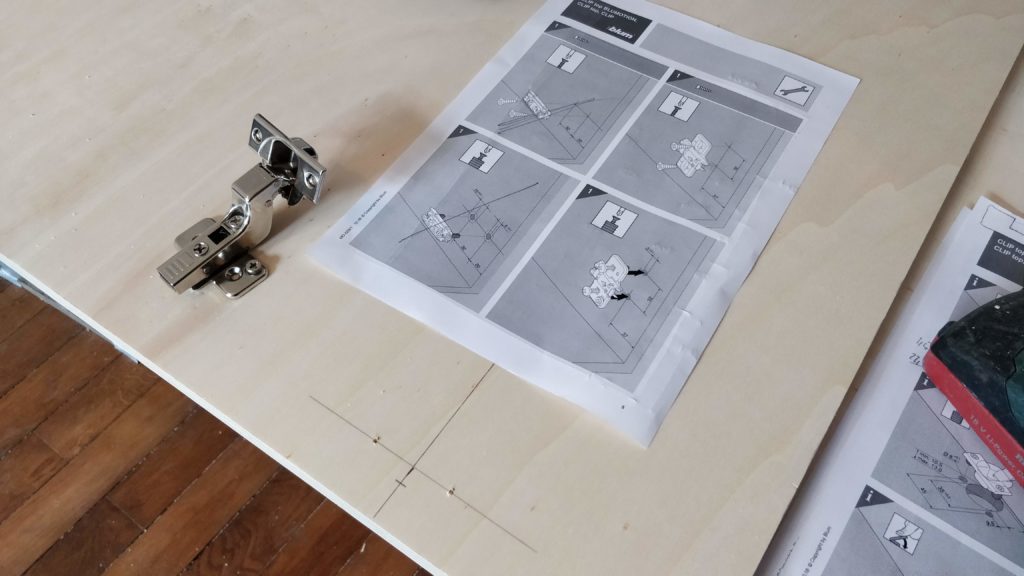
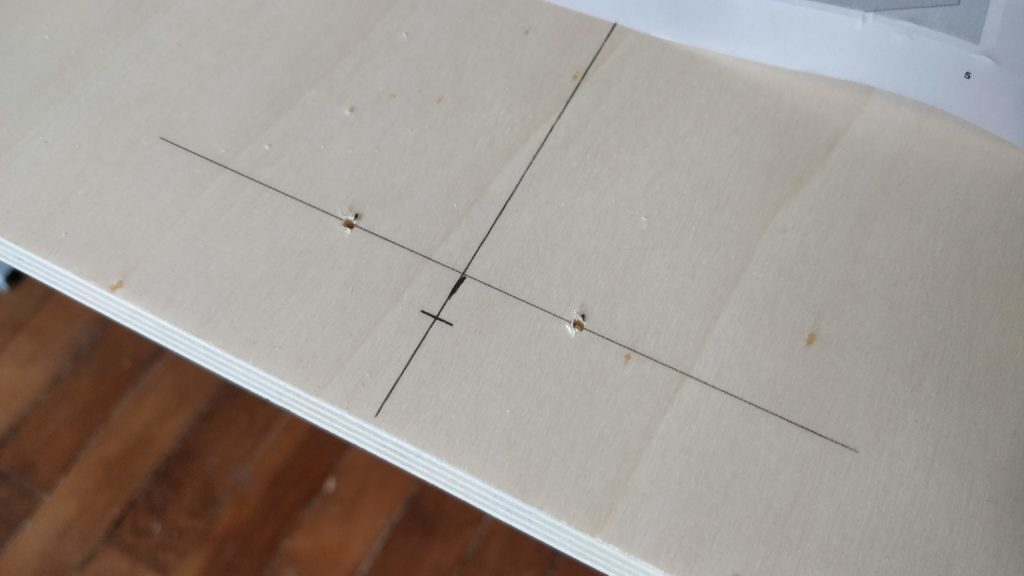
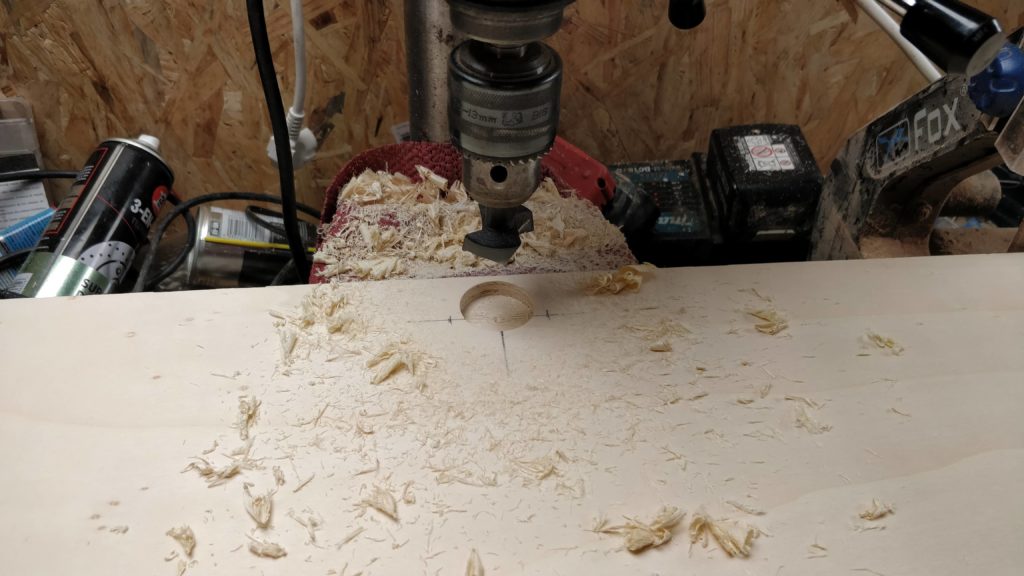
Passons aux portes, j’ai choisi du contreplaqué peuplier de 18mm : léger et rigide à la fois. Et pour les charnière, BLUM comme toujours, que je trouve chez Foussier, au Mans

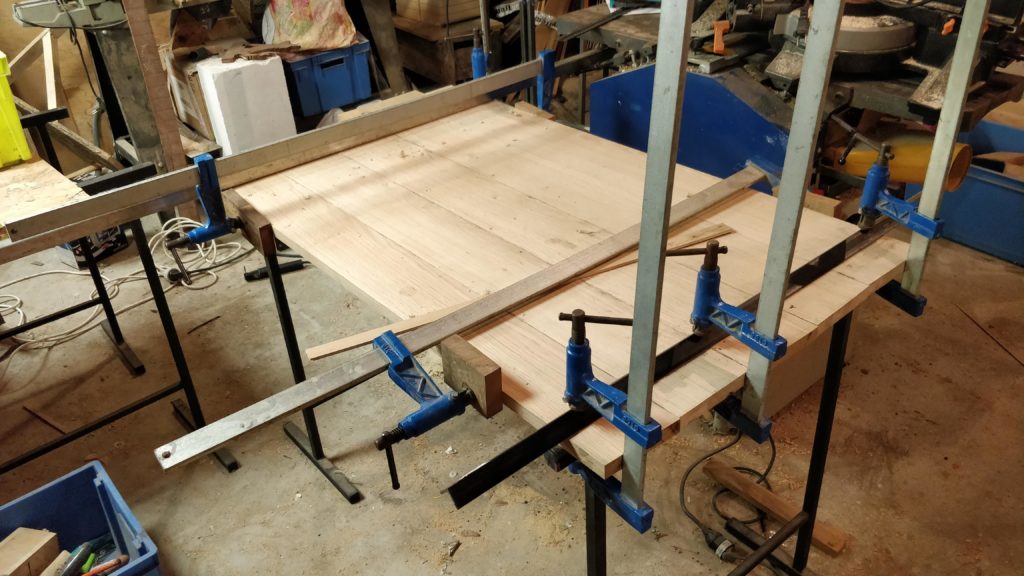
Une des planches était un peu gauche, j’ai du la mettre en pression toute la nuit

Mise en peinture


Montage final :


Effet placard « invisible » réussi !